#include <features.h>
|
| bool | found () const |
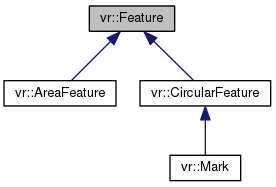
| | Feature gefunden. More...
|
| |
|
bool | usable () const |
| |
| bool | isChanged () const |
| |
|
cv::Point2f | getCenter () const |
| |
| void | setCenter (const cv::Point2f ¢er) |
| |
|
void | reset () |
| |
|
FeatureStatus | getStatus () const |
| |
|
void | setStatus (const FeatureStatus status) |
| |
|
|
virtual void | _setCenter (const cv::Point2f ¢er)=0 |
| |
|
virtual void | addOffset (const cv::Point &offset)=0 |
| |
|
double | getScaleFactor () const |
| |
|
virtual cv::Point2f | getScaledCenter () const =0 |
| |
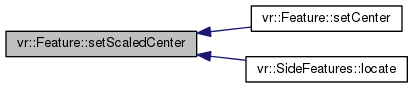
| void | setScaledCenter (const cv::Point2f ¢er, bool notifyContainer=true) |
| | Setzt den Mittelpunkt relativ zum intern skalierten Bild. More...
|
| |
|
void | setContainer (FeatureContainer *container) |
| |
- Author
- Robert Rossmair
- Date
- 07/12/15
| bool vr::Feature::found |
( |
| ) |
const |
|
inline |
Feature gefunden.
Feature wurde erfolgreich im Bild lokalisiert. Äquivalent zu (getStatus() == fsPositive).
- Returns
- true: gefunden; false: nicht gefunden.
| bool vr::Feature::isChanged |
( |
| ) |
const |
|
inline |
| void vr::Feature::setCenter |
( |
const cv::Point2f & |
center | ) |
|
|
inline |
| void vr::Feature::setScaledCenter |
( |
const cv::Point2f & |
center, |
|
|
bool |
notifyContainer = true |
|
) |
| |
|
protected |
Setzt den Mittelpunkt relativ zum intern skalierten Bild.
Setzt den Mittelpunkt relativ zum intern skalierten Bild. Benachrichtigt, falls (notifyContainer == true), den Container, daß der Mittelpunkt versetzt wurde (und stößt dadurch evtl. Berechnungen an).
- Parameters
-
| center | neuer Mittelpunkt |
| notifyContainer | Flag, das bewirkt, daß container_ von der Änderung informiert wird. |
The documentation for this class was generated from the following files:

 1.8.6
1.8.6 

