|
vrcore
0.45
visuReal Messkern
|
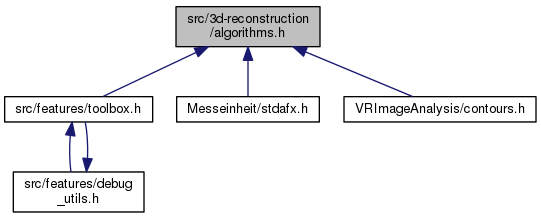
Generell nützliche Algorithmen. More...
#include <opencv2/opencv.hpp>
Go to the source code of this file.
Classes | |
| class | vr::Line |
| Gerade im Raum. More... | |
| class | vr::Plane |
| Ebene. More... | |
| class | vr::AxisParallelEllipse |
| Achsenparallele Ellipse. More... | |
Functions | |
| template<typename T > | |
| int | vr::sgn (T val) |
| Vorzeichen von val. | |
| int | vr::adaptedNewtonsMethod (cv::Vec3d &depth, double *residuum, double p_L, double p_R, double p_M, double q_LR, double q_LM, double q_RM, double d_LR, double d_LM, double d_RM, double epsilon) |
| cv::Vec3d | vr::adaptedNewtonsMethodForBC (const cv::Vec3d &F_O, const cv::Vec3d &F_A, const cv::Vec3d &F_U, double rq, const cv::Vec3d &start, double epsilon) |
| template<int n> | |
| cv::Vec< double, n > | vr::SP (const cv::Vec< double, n > &p, const cv::Vec< double, n > &v, const cv::Vec< double, n > &w) |
| Fußpunkt des Normalenvektors vom Punkt \(\vec{p}\) auf die Gerade \(\vec{v} + t \cdot \vec{w}\). More... | |
| int | vr::calcLineCircleIntersections (double &result1, double &result2, const cv::Vec2d &linePoint, const cv::Vec2d &lineDirection, const cv::Vec2d ¢er, const double radius) |
| int | vr::calcLineCircleIntersections (cv::Vec2d &result1, cv::Vec2d &result2, const cv::Vec2d &linePoint, const cv::Vec2d &lineDirection, const cv::Vec2d ¢er, const double radius) |
| int | vr::calcLineSphereIntersections (cv::Vec3d &result1, cv::Vec3d &result2, const cv::Vec3d &linePoint, const cv::Vec3d &lineDirection, const cv::Vec3d ¢er, const double radius) |
| bool | vr::getPlaneNormalForm (cv::Vec3d &normal, double &lambda, const cv::Vec3d &direction1, const cv::Vec3d &direction2, const cv::Vec3d &planePoint) |
| void | vr::calcLinePlaneIntersection (double &result, const cv::Vec3d &linePoint, const cv::Vec3d &lineDirection, const cv::Vec3d &planeNormal, const double lambda) |
| cv::Vec3d | vr::calcLinePlaneIntersection (const cv::Vec3d &linePoint, const cv::Vec3d &lineDirection, const cv::Vec3d &planeNormal, const double lambda) |
| cv::Vec3d | vr::calcLineIntersection (const cv::Vec2d &line1Point1, const cv::Vec2d &line1Point2, const cv::Vec2d &line2Point1, const cv::Vec2d &line2Point2) |
| void | vr::calcLineIntersection (cv::Vec2d &result, const cv::Vec2d &line1Point1, const cv::Vec2d &line1Point2, const cv::Vec2d &line2Point1, const cv::Vec2d &line2Point2) |
| double | vr::deg2rad (double deg) |
| double | vr::rad2deg (double rad) |
| bool | vr::IsPointInEllipse (const cv::Point2d p, const cv::Point2d ¢er, const cv::Point2d &radius) |
| determines whether a given point is within an ellipse whose axes are parallel to the coordinate system axes More... | |
Generell nützliche Algorithmen.
 1.8.6
1.8.6 
